
предназначена для программной обработки информации, управления приемом-выдачей сигналов обмена с элементами ввода-вывода, аналого-цифрового преобразования в соответствии с программами, записанными в ПЗУ, а также для ввода информации о состоянии частотных датчиков и выдачи импульсных команд фазового управления тиристорами ВИП и ВУВ. Внешний вид ячейки МК3 представлен на рисунке 2.4.
Ячейка состоит из следующих функциональных узлов:
- процессорная плата 6010 (6020) на помехоустойчивой КМОП-структуре;
- узел буферизации системной шины;
- узел дешифратор адреса;
- узел измерителя скорости;
- входной буфер сигналов от датчиков скорости;
- формирователи сигналов управления ВИП и ВУВ;
- узлы буферизации сигналов управления ВУВ и ВИП:
- узлы буферизации локальной шины данных и локальной шины управления ячейки УДЗ;
- узел индикации;
- узел формирования сигнала «отказ процессора».
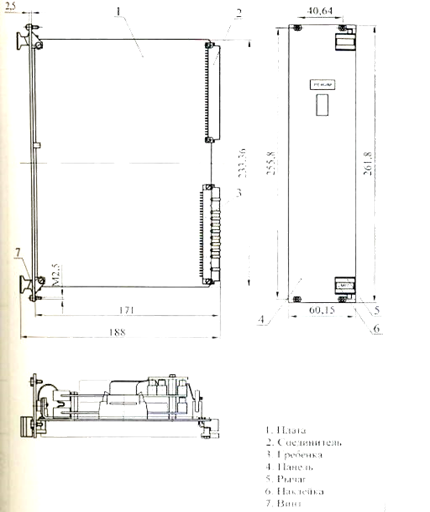
Рисунок 3 – Внешний вид ячейки МК3.
Плата 6010 (рисунок 2.5) предназначена для программной обработки информации и содержит:
- процессор 386SХ, 25 МГц фирмы Intel;
- встроенную операционную систему DOS в ПЗУ;
- Phoenix BIOS с расширениями;
- флэш-ПЗУ объемом 1 Мбайт с файловой системой;
- статическое ОЗУ объемом 128 к
байт, обеспечивающее энергонезависимую память с неограниченными циклами считывания и записи;
- динамическое ОЗУ 4 Мбайт;
- два порта последовательной связи СОМ1 (RS-232) м СОМ2 (RS-232);
- универсальный параллельный порт LPT1;
- сторожевой таймер;
- программу самодиагностики ПЗУ.
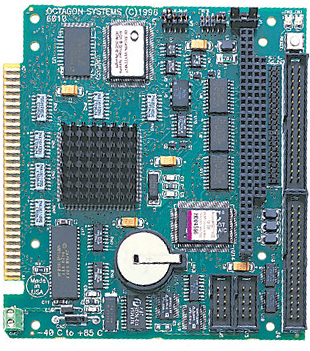
Рисунок 2.5 – Внешний вид платы Octagon Systems 6010
Последовательные порты СОМ1 и СОМ2 совместимы с 8250. Программируемая скорость передачи информации в бодах составляет от 150 до 115К бод. Оба порта имеют интерфейс RS-232.Узел буферизации системной шины обеспечивает усиление и обмен сигналами, формируемыми ячейкой, с системными ресурсами. Дешифратор адреса осуществляет формирование сигналов ВЫБОР1 ВЫБОР4, обеспечивающих подключение устройств ячейки МКЗ к шине данных DВ0 .DВ7, а также формирование сигналов записи W1 . W5 и чтения R1…R5 локальной шины управления ячейкой УДЗ.Измеритель скорости предназначен для ввода информации от датчиков скорости, поступающей от ячейки ПУ1.2, а также для определения направления движения локомотива. Формирователи сигналов управления ВИП и ВУВ предназначены для выдачи импульсных команд управления силовыми тиристорными узлами электровоза в соответствии с программой, заложенной в ПЗУ платы 6010.
Узел индикации предназначен для отображения информации о режиме работы программного обеспечения на 7-ми сегментном индикаторе, находящемся на лицевой панели ячейки. Узел управляется сигналами LED1 .LEDЗ от параллельного порта платы 6010.
Узел формирования сигнала «отказ процессора» предназначен для формирования импульсов, обеспечивающих включение сигнализации отказа микропроцессорного комплекта на блоке индикации аппаратуры МСУД